Alcuni importanti aggiornamenti.
Ad un certo punto, andando avanti con la costruzione dell'impianto, mi sono trovato di fronte alla necessità di dover essere certo che la parte elettrica fosse perfettamente efficiente. Questo per potermi poi dedicare alla costruzione delle parti più complesse e delicate del paesaggio senza il timore di dover intervenire di nuovo sull'impianto elettrico, che di solito si trova in posti poco accessibili e che possono richiedere anche qualche smontaggio. Rimettere le mani su ciò che è stato costruito con molte attenzioni è sempre un rischio che è bene evitare.
Prima di passare alla costruzione della linea aerea, che è molto impegnativa e delicata, ho deciso di provare la parte elettrica. Attraverso Win-Digipet 9.0 ho costruito diverse semplici tabelle orarie, e le ho collegate tra loro in modo tale che facciano muovere, su e giù per il plastico, nove treni per un tempo complessivo di circa quaranta minuti, interessando tutti binari, e simulando tutte le condizioni d'esercizio di una stazione vera.
Come già visto in precedenza, tutto il movimento è gestito da Win-Digipet attraverso i sensori ad assorbimento ed i contatti reed posti nei punti chiave dell'impianto. Con questo sistema si può tenere sotto costante controllo il movimento dei treni e prendere le decisioni necessarie affinché ciò che è stato programmato, attraverso la compilazione delle tabelle orarie, si verifichi poi realmente sull'impianto con il movimento dei treni.
In origine avevo costruito il sistema delle retroazioni usando solo due moduli S88, che hanno 32 ingressi in totale. Pensavo che fossero sufficienti per la gestione di tutto l'impianto. Non era così, me ne accorsi quando iniziai a costruire gli itinerari, e fu allora che decisi di raddoppiare il numero degli ingressi portandoli a 64. L'incremento non lo feci continuando ad usare gli S88, ma i più nuovi "LocoNet" che dialogano con l'Intellibox in modo più efficace e possono essere programmati in alcune loro funzioni.
Avevo così l'impianto che per le prime 32 retroazioni sfruttava gli S88, mentre per le restanti 32 i "LocoNet". I moduli S88 possono essere usati indistintamente collegando ai loro ingressi sia contatti reed, sia sensori ad assorbimento, e così era stato fatto nel mio impianto. Gli altri ingressi relativi ai "LocoNet" erano stati suddivisi tra 16 ulteriori reed collegati ad un modulo 63350 ed altri 16 ad assorbimento su due moduli 63340 che hanno 8 ingressi ciascuno. Avevo scelto di collegare al 63350 tutti i reed della stazione nascosta che sono più grandi e posti longitudinalmente al binario, a differenza di quelli usati per la stazione modello che, per ovvi motivi estetici, ho messo trasversalmente al binario e sono più piccoli, in modo tale da poterli meglio nascondere alla vista. Questi ultimi erano tutti collegati agli S88.
La scelta se usare un reed o un sensore ad assorbimento è data dall'uso che voglio fare di quella particolare retroazione. Quelle che servono solo a rivelare la presenza di una loco su di una tratta sono ad assorbimento, le altre, che servono a rivelare la presenza di una loco in un punto ben preciso, sono a reed. I reed sono quasi indispensabili se si vogliono programmare anche manovre che richiedono una certa precisione, poiché con gli altri sensori è molto più precaria da ottenere.
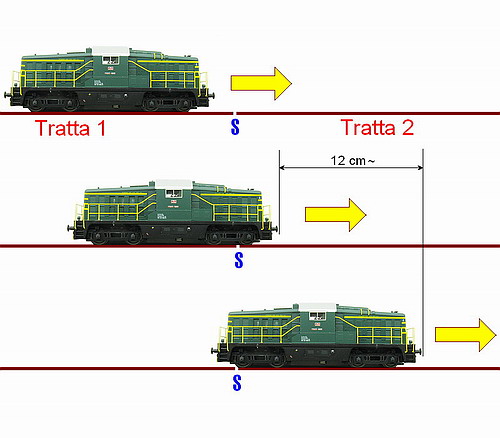
Per capire meglio il discorso della precisione facciamo un esempio. Nella figura di sotto supponiamo di avere una loco che si muove verso un sezionamento tra due tratte contigue alimentate attraverso sensori ad assorbimento. nel primo caso, in alto, la loco si trova sulla tratta 1 ed il relativo sensore invierà a Win-Digipet l'informazione della sua posizione, che non è precisa, poiché la loco potrebbe trovarsi in un punto qualunque del'intera tratta che l'informazione inviata sarebbe sempre la stessa.
Nel momento, però, in cui il primo asse della loco impegna la tratta 2 si dovrebbe avere la certezza della sua esatta posizione, perché quello è un istante ben preciso relativo ad un'altrettanto precisa posizione. Purtroppo non è così. Non è certo, infatti, che quell'asse sia in condizione di prendere corrente in maniera altrettanto efficace, o paragonabile, a quella degli altri tre che sono rimasti sulla tratta 1. Perché, se il contatto ruota / rotaia del primo asse presenta una resistenza maggiore degli altri, la corrente continuerà ad essere prelevata dalla tratta 1, e l'informazione d'impegno della tratta 2 non giungerà a Win-Digipet.
In teoria la cosa può ripetersi anche per gli altri assi che via via lasceranno la tratta 1 per la 2, fino a quando saranno passati tutti sull'altra. Nell'istante che il quarto asse è sulla tratta 2 è certo che la corrente giungerà alla loco attraverso quella tratta, quindi Win-Digipet ne sarà informato; ma fino allora non vi è nessuna certezza matematica che lo faccia. Usando la loco in figura, il percorso che può fare in stato d'incertezza è di circa 12 cm.
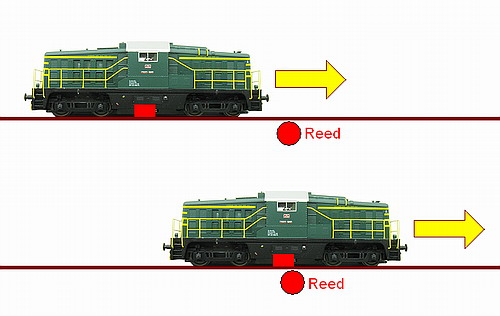
Diverso è, invece, il caso in cui si usano i reed. Nel disegno sotto, la solita loco, munita di un piccolo magnete incollato al telaio, avvicinandosi al reed lo azionerà, chiudendo il suo contatto, ad una distanza che sarà sempre la stessa per quel senso di marcia, non dipendendo affatto dal contatto ruota / rotaia.
I magneti si montano con molta facilità, basta una piccola goccia di cianoacrilico ed il problema, quasi sempre, si risolve.
I magneti di ogni forma e dimensione possono essere ordinati QUI Nella loco in figura ne ho montato uno di 6 x 2 mm, al quale ne ho sovrapposto un altro di 6 x 1 mm, per aumentarne l'efficienza, anche se non era necessario, dato che sono molto potenti.